完善资料让更多小伙伴认识你,还能领取20积分哦, 立即完善>
3天内不再提示
|
这款六足机器人的设计灵感来源于Trossen Robotics的PhantomX AX型号。原版PhantomX(已停产)售价高达1300美元,远超我的预算,因此我决定采用廉价的180度MG996R仿制舵机(11kg-cm扭矩)自主设计。在项目启动前,我通过估算舵机、3D打印件、硬件和电子元件的总重量,计算了各腿部关节的最恶劣工况扭矩需求,确认这些舵机足以胜任。我以单价约5美元购得标有"LKY62"的舵机。需注意:老款MG995舵机因采用旧式控制电路且扭矩可能不足,未经验证其适用性,若有成功使用经验请告知!其余部件(SBEC、Mega 2560主板、锂聚合物电池、电平转换器、624Z轴承、螺丝等)总成本约75美元。PS2手柄为已有设备,但仍可找到仿制品。3D打印件消耗约600克黑色PLA线材,成本低于10美元。项目总成本约200美元。 设计与制造使用Autodesk Fusion 360进行三维建模,并通过Creality CR-10S 3D打印机完成打印。结构设计强调轻量化(薄壁、减重孔等)以适配所选舵机性能。黑色PLA部件采用较高打印温度(210°C)以增强层间粘合与结构强度,所有部件均使用0.4mm喷嘴以0.2mm层高打印。3D模型文件已上传至Thingiverse。 部件清单黑色PLA打印(30%填充率,无需支撑):
PLA打印(需支撑):
黑色TPU打印(10%填充率):
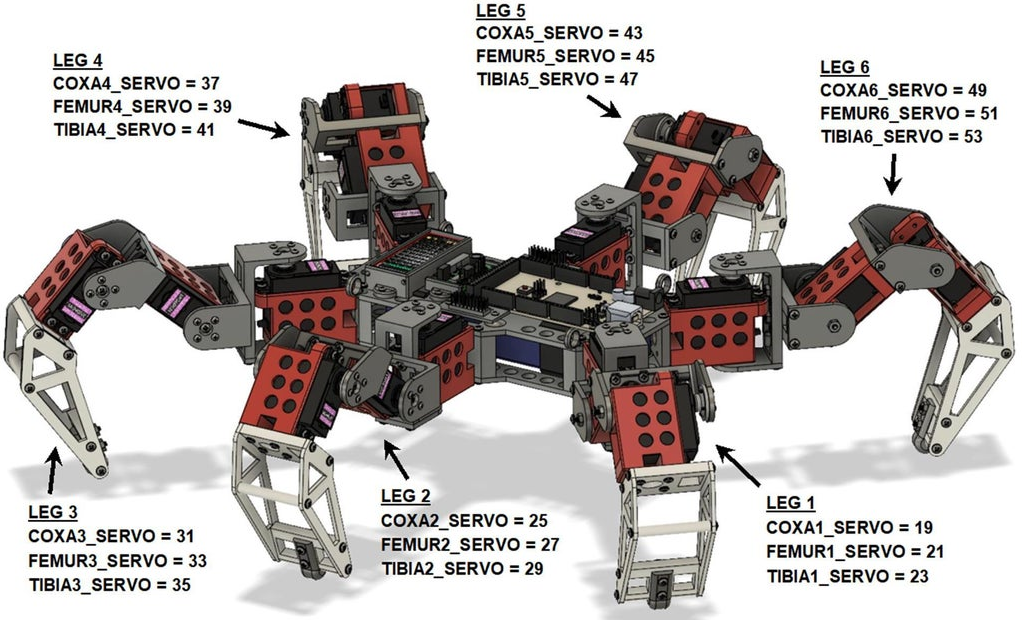
硬件规格与完整清单详见下方PDF附件: 步骤1:CAD建模通过Fusion 360完成六足机器人建模(见上图),定义腿部编号(前右腿为1号,顺时针排列)与舵机-处理器引脚映射关系。舵机分配信息声明于Arduino代码的常量区。
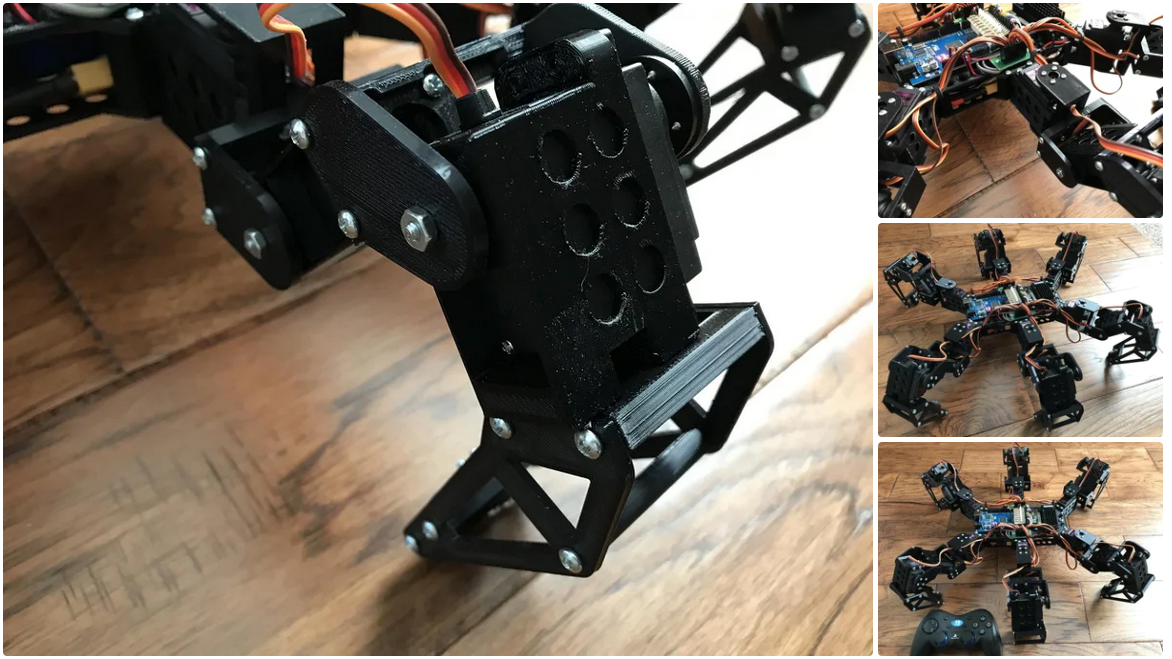
步骤2:组装六条腿采用相同组装方式,使用3/8"、1/2"、5/8" 4-40机械螺丝及1/4" #2螺丝(McMaster-Carr采购)连接。实测无需攻丝,电动螺丝刀可直接旋入打印孔。624Z轴承需加热后压入舵机座以简化安装。 关键提示 :组装前需通过PS2手柄"SELECT"键将所有舵机居中(90度位置),详见步骤5图示。
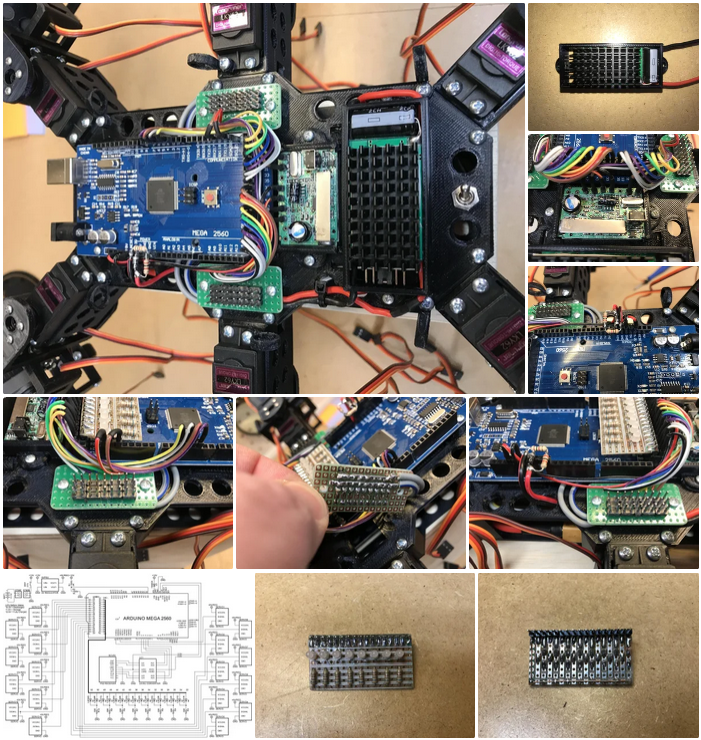
步骤3:电子系统核心电子元件包括:
完整电路图与实物连接见下方示意图。
步骤4:启动注意事项通电时舵机会随机复位后归位,需悬空启动以防腿部撞击地面损坏PLA部件或齿轮。
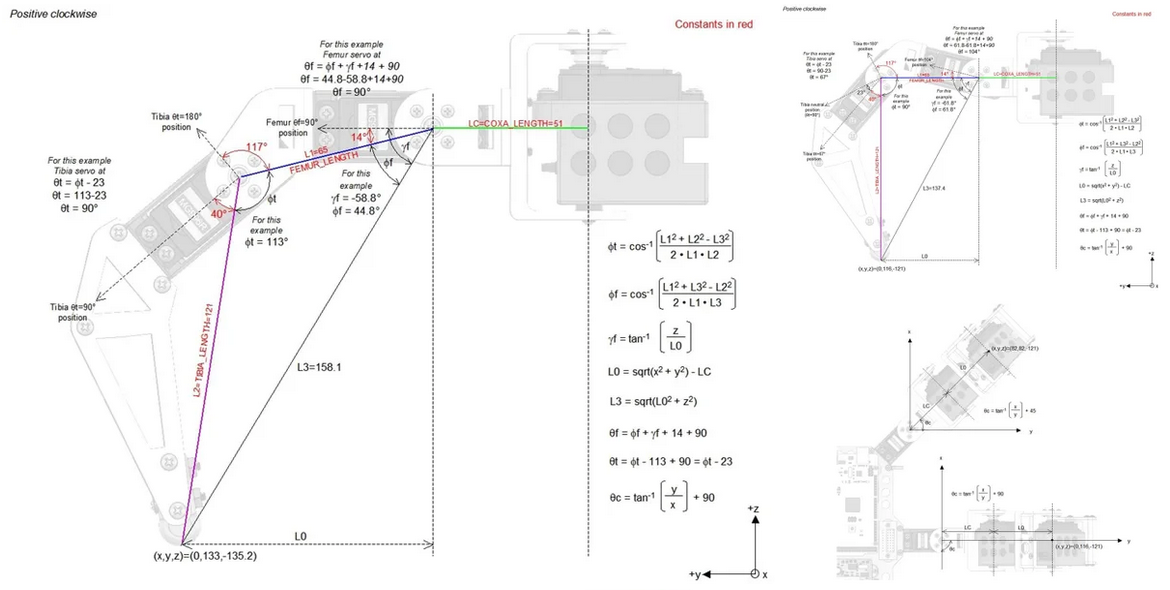
步骤5:逆运动学与步态算法
基于逆运动学(IK)计算足尖坐标对应的舵机角度,结合胫骨、股骨、基节长度及伺服偏移量实现精准控制。预设步态包括:
通过PS2摇杆输入移动指令,步态引擎计算足尖轨迹后由IK解算各舵机角度。另有原地平移/旋转模式,通过坐标偏移或旋转矩阵实现。 步骤6:PS2手柄适配
修改
添加双向电平转换器解决部分接收器电压兼容问题,详见示意图。 步骤7:软件配置核心代码参数说明:
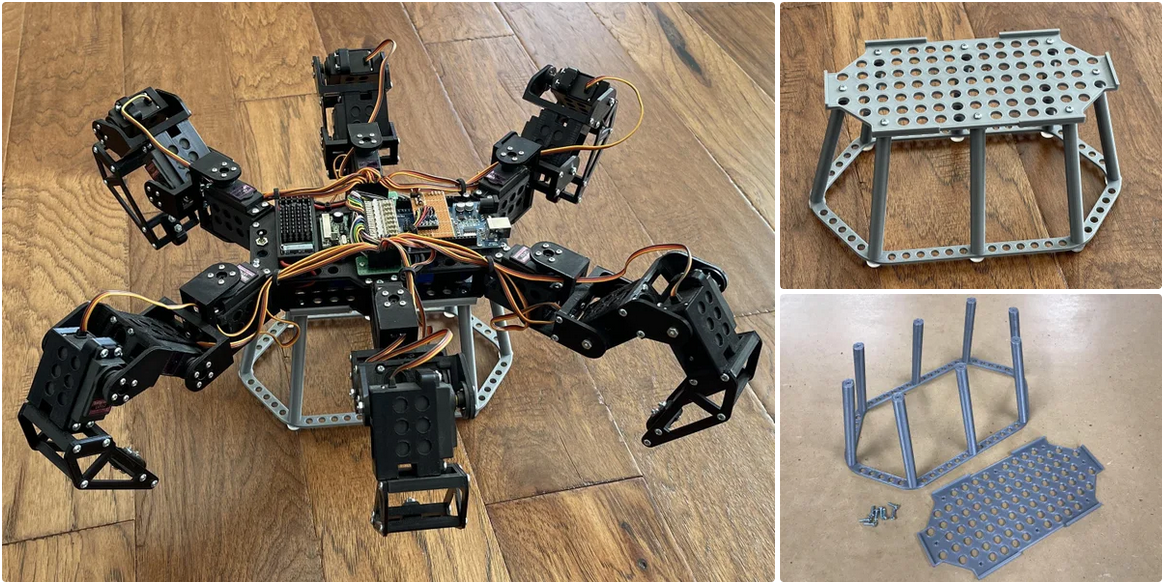
修改代码前需根据实际机器人尺寸调整上述参数,校准流程详见步骤2。 步骤8:展示架
3D打印灰色金属质感PLA支架(模型文件),通过8颗螺丝组装。注意钻孔时避免材料开裂,安装时防止支架扭曲变形。 通过以上步骤,完整复现这款低成本、高性能的六足机器人。开发过程中建议使用支架辅助调试,避免足部意外触地。如需进一步优化步态或扩展功能,可基于提供的Arduino代码进行二次开发。 其他代码资料:*附件:机器人资料.7z
|
1248 浏览 0 评论
1323 浏览 0 评论
电磁脉冲:想做个大功率的电磁脉冲,请各位大神告诉我要买哪些设备?
2125 浏览 0 评论
9908 浏览 0 评论
9352 浏览 0 评论
 /6
/6 
关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
电子发烧友 (电路图) 湘公网安备 43011202000918 号 电信与信息服务业务经营许可证:合字B2-20210191 工商网监
湘ICP备2023018690号
工商网监
湘ICP备2023018690号






 9355
9355





 淘帖
淘帖



