完善资料让更多小伙伴认识你,还能领取20积分哦, 立即完善>
3天内不再提示
|
“ 这是一个还在迭代中的项目。开源的回声测深仪/水深测量仪/声呐系统,适用于水文测绘及科研用途。基于Arduino平台开发并具备良好兼容性 ”
Open Echo 概览 作为持续迭代的开源硬件项目,Open Echo 致力于构建高精度声呐系统,主要应用于水文测绘与科研探测领域。项目遵循完全开源协议,目前已在GitHub平台公开全部技术资料(代码库、原理图、PCB文件): https://github.com/Neumi/open_echo 回声测深仪是一种用于测量水深的设备,它发出短促的声波(通常是超声波),然后等待回声返回。通过测量回声返回所需的时间,该装置可以计算出超声波传感器下方的水深。 几乎所有船只都使用回声测深仪来导航和确保安全。研究人员依靠它们进行测深、绘图和考古研究。搜救(SAR)队使用它们进行定位和打捞,而渔民则使用它们来确定鱼类丰富区域的位置。 我需要一个与 Arduino 兼容的回声测深仪用于另一个水深 GPS 记录设备项目。可读取 Arduino 的回声测深仪很难买到,所以我想,为什么不自己制作呢?基本工作原理很简单,但底层的电子学和物理学并不总是那么简单。 因此,我接受了挑战,并立即投入其中...... 项目当前状态
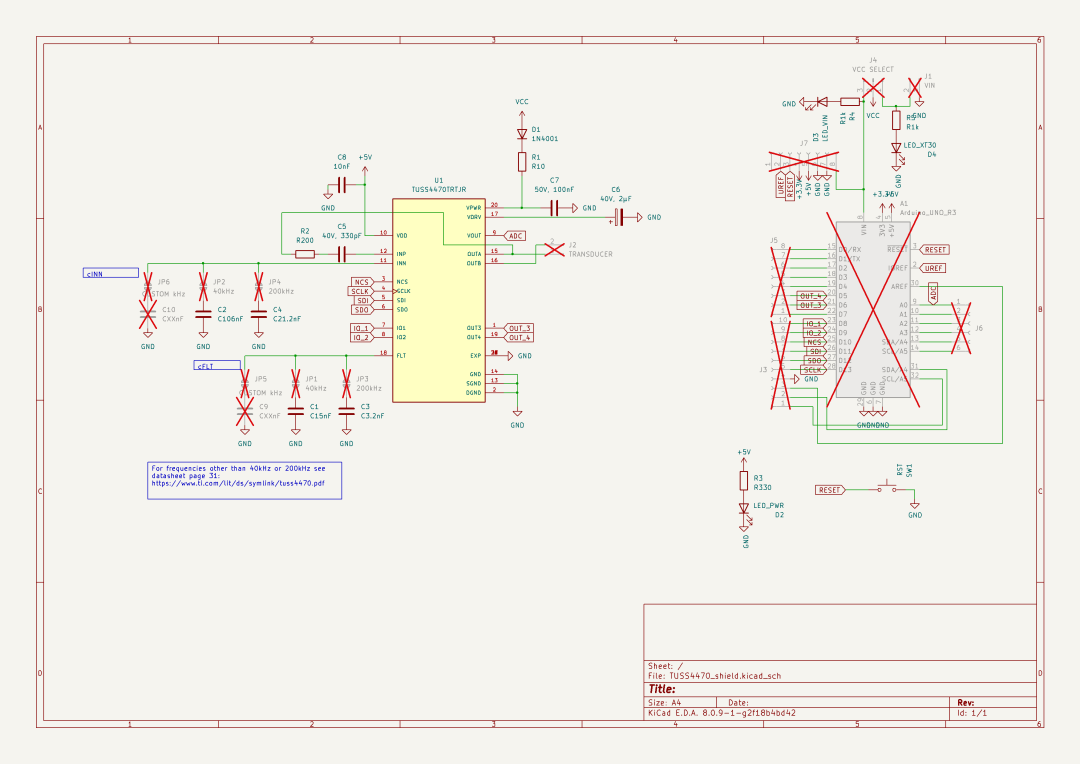
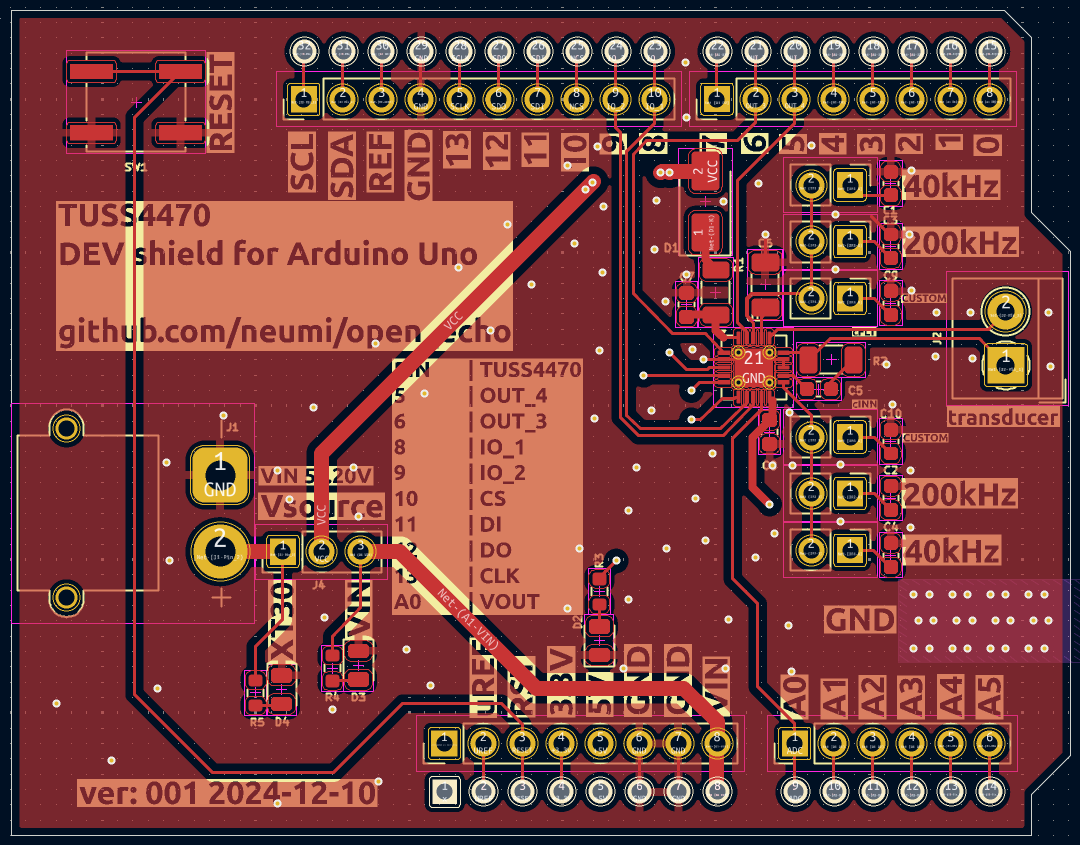
新的 TUSS4470 电路板现在可以使用传感器(已测试 40kHz 和 200kHz)、驱动传感器、接收回声、过滤信号并将 RAW 回声数据发送到 Python 后端。为了获得良好的效果,在 XT30 连接器上使用直流 25V 电压。 TUSS4470 超声波传感器驱动器 Arduino 板 该 PCB 板与 Arduino (Uno) 兼容,用于测试 TI 的 TUSS4470 超声波驱动器集成电路。所提供的 Arduino UNO 示例代码可让您驱动一个 40kHz 的传感器,应用噪声过滤,并通过串行接口将回声发送到 Python 后端。您可以根据自己的需要修改代码(如使用其他频率、采样大小、速度等)。Arduino UNO 的时钟速度和 RAM 大小限制了采样速度,使其在空气中的分辨率约为 1-2 厘米,在水中的分辨率约为 4 厘米(约 13uS/sample ),采样次数约为 850 次。Arduino MEGA 可以部分解决这个问题。 TUSS4470 Arduino Shield:
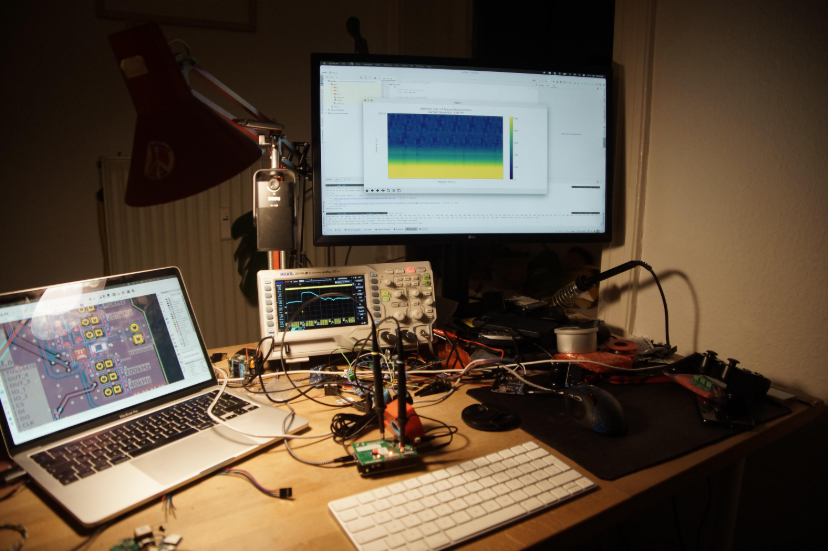
TUSS4470 的工作原理如下: 初始设置完成后,Arduino 通过 PIN9 向 TUSS4470 发送 8 个驱动频率脉冲串。TUSS4470 将此脉冲发送至传感器,然后等待。传感器将此脉冲作为短脉冲声音发送出去。障碍物反射的回声反弹到传感器,并在产生电压。TUSS4470 会测量该电压,对其进行过滤和放大,然后将其发送到 Arduino 的 A0 引脚。通过读取放大后的电压,可以检测到一个(或多个)障碍物。Python 脚本将这些数据绘制成瀑布图。 用于水下的带 1:6 变压器和 228kHz 的 DIY 传感器组件:
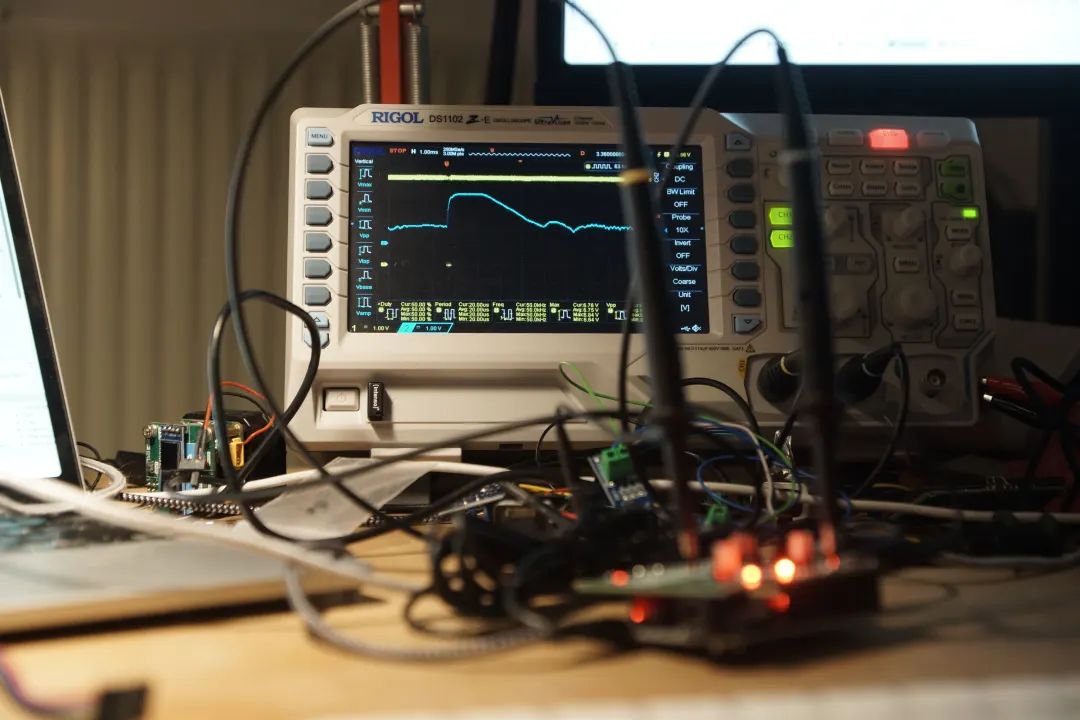
使用 DIY 传感器组件进行测试的回声图:
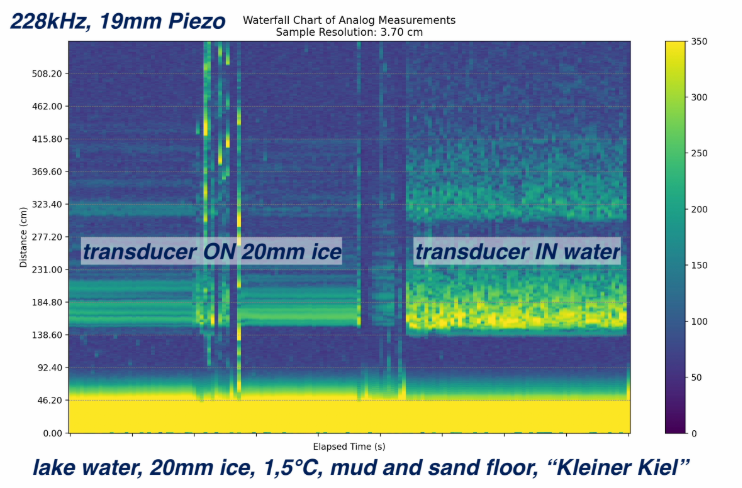
海水环境垂直向与水平向联合探测(8倍速采集),后半程水下呈阶梯结构: 200kHz 19 毫米的传感器可以穿透 20 毫米厚的冰层,结果依然良好。在传感器表面和冰层之间有一层液态水很重要。与传感器和水之间没有冰层相比,回声较弱,但地面仍清晰可见,甚至还有第二次反射。
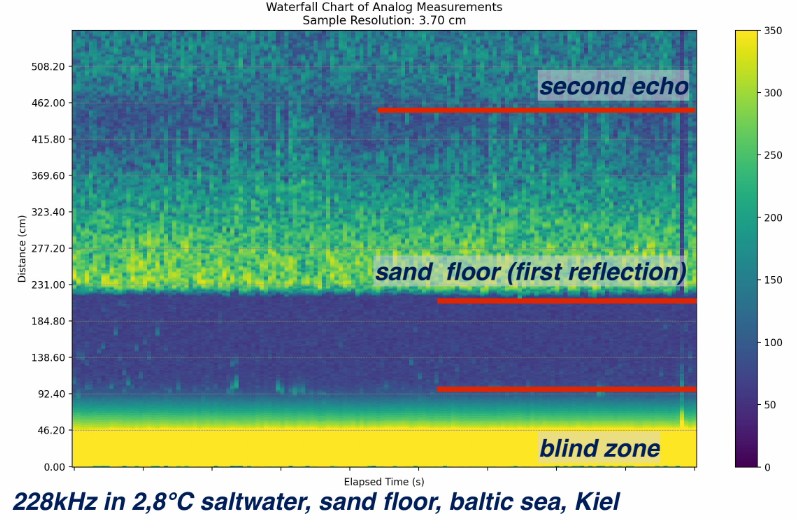
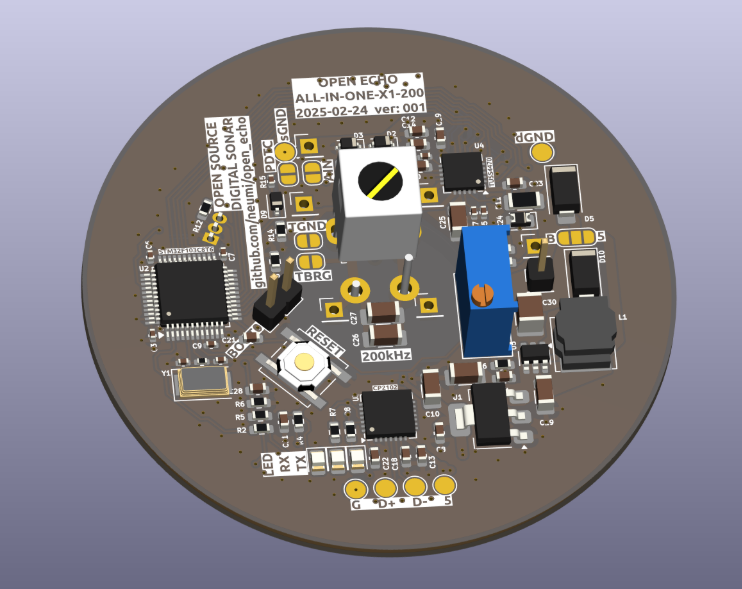
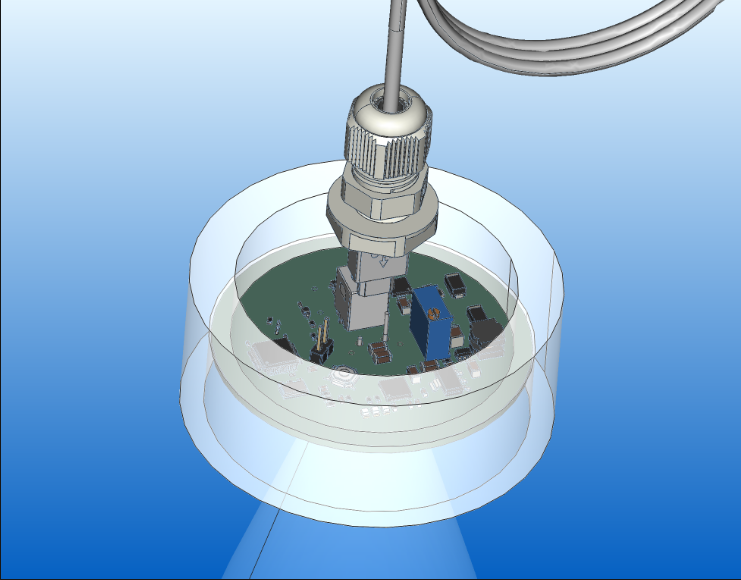
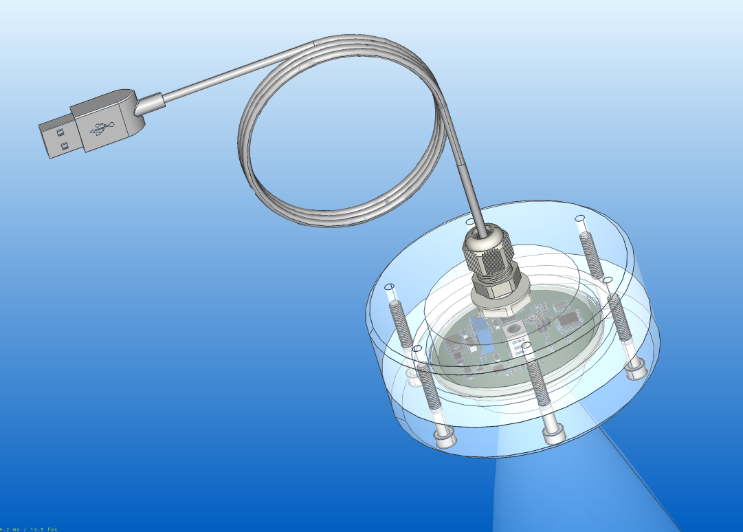
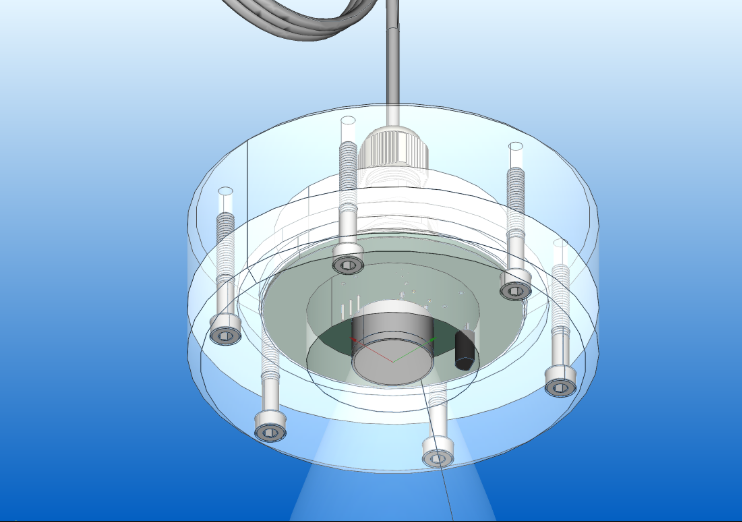
瀑布图可以让您更好地了解过去的情况,并更好地区分真正的回声和噪音。压电传感器在发出声音脉冲后很长时间内会产生振荡。这是图中较低的黄色部分(约 50 厘米)。在这个盲区内,您不会看到回声或反射。 回声测深仪的探测范围不仅取决于电子设备,还在很大程度上取决于换能器频率和使用介质。例如,上述 200kHz 设置在空气中的范围只有 50 厘米,但在海水中至少有 8 米。这是介质衰减(取决于频率)和波束形状(在每种介质中都不同)造成的。作为一个良好的起点,200kHz 适合水下使用。 如前所述,波束形状在很大程度上取决于频率。直径为 10 毫米、频率为 100 千赫的传感器的波束开角约为 130°,相同尺寸、频率为 200 千赫的传感器的波束开角约为 55°。频率越高,光束越窄。但衰减也会增加。 此外,波长越短(频率越高),您能看到的细节就越小。海水中 200 千赫的声音信号波长约为 7.5 毫米。可分辨的最小物体约为波长的一半,即约 3.75 毫米。 正在开发中的新PCB 继 TUSS4470 Arduino Shield之后,我正在开发一块新的一体化电路板,将所有元件集成到一个组件中。该装置可封装在环氧树脂、聚氨酯或硅胶中以防水,并通过 USB 连接到带有基于 Python 的后台和接口的计算机。这种设置可对采样、驱动频率、原始数据等进行全面的软件控制。
。外壳将由铝或塑料经数控加工而成,内装电子元件,以保护它们不受环境影响。19 毫米 200kHz 传感器将采用聚氨酯或硅胶封装,而有源表面将直接与水接触。
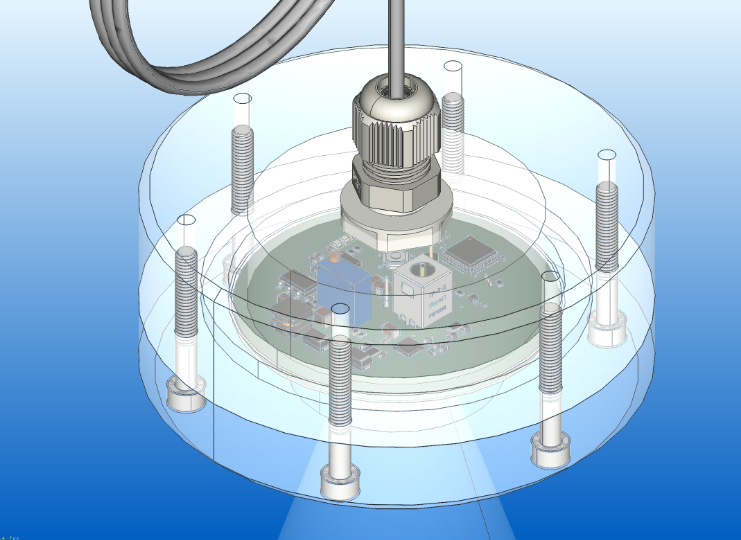
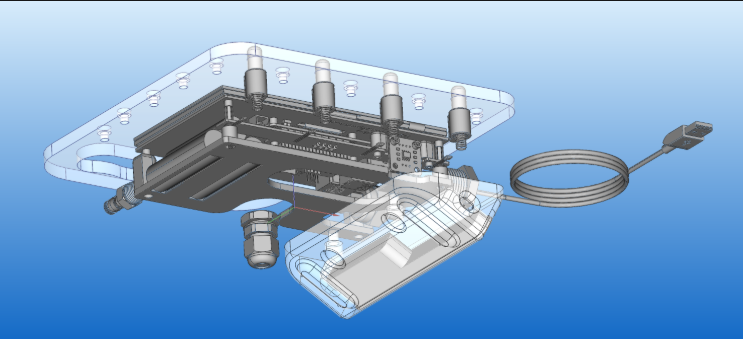
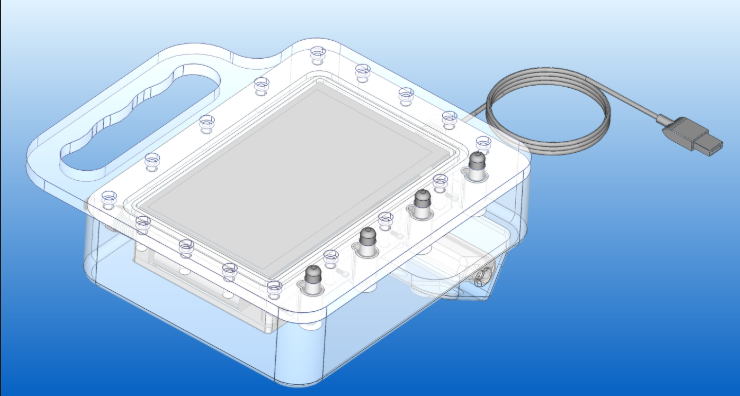
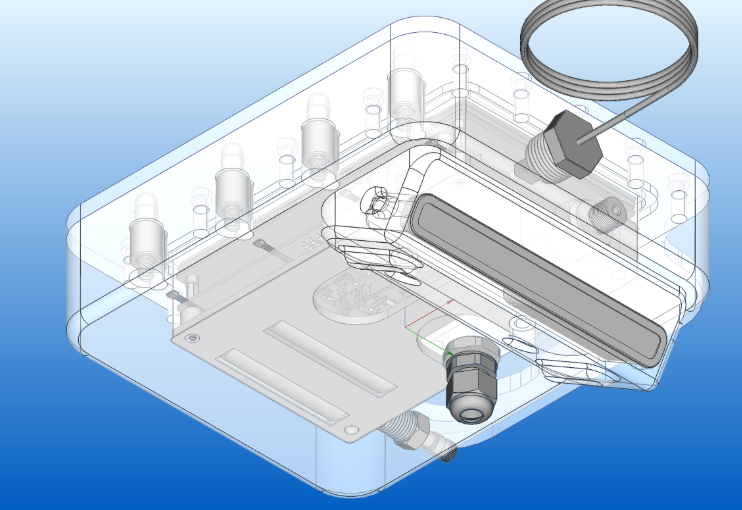
水下潜水声纳 除了电子设计和 RAW 输出回声测深仪外,我还在开发一款带声纳的潜水计算机。它基于一个 Raspberry Pi + 7" 显示器、一个 IMU 和 KOGGER Basic Sidescan。我的第一个想法是将 KOGGER Basic 侧扫声纳安装上去。这很可能是获得良好水下声纳图像的最简单方法。也许以后我会自己制作一个 FAN 声纳,安装在潜水电脑上。但我们还是一件事、一件事慢慢来...... FAN/Sidescan SONAR 传感器与陀螺仪传感器和 Raspberry Pi 结合使用,可以显示前方地面或沉船等障碍物的扫描图像。 外壳由 50 毫米厚的聚乙烯块加工而成。箱盖采用 PMMA 材料密封,箱体采用 5 毫米 O 形环密封。内部使用潜水罐中的干燥空气进行加压,以防止水渗入,对密封件进行预压,并检查是否有泄漏(同时防止内部结露)。 四个带磁铁的按钮与内部的霍尔效应传感器相互作用,这些传感器位于 RPi 的载板上。其余部分用于电池管理、一个磁性旋转编码器、压力传感器的 ADC 和一个使用 1/2 英寸水管盖的防水 USB 连接器。 我在水中测试了几次 KOGGER BASIC 侧扫仪,分辨率和范围都非常不错。(不过,我还需要做更多的测试,并编写使用陀螺仪数据的软件,使其成为一个扫描侧扫声纳。
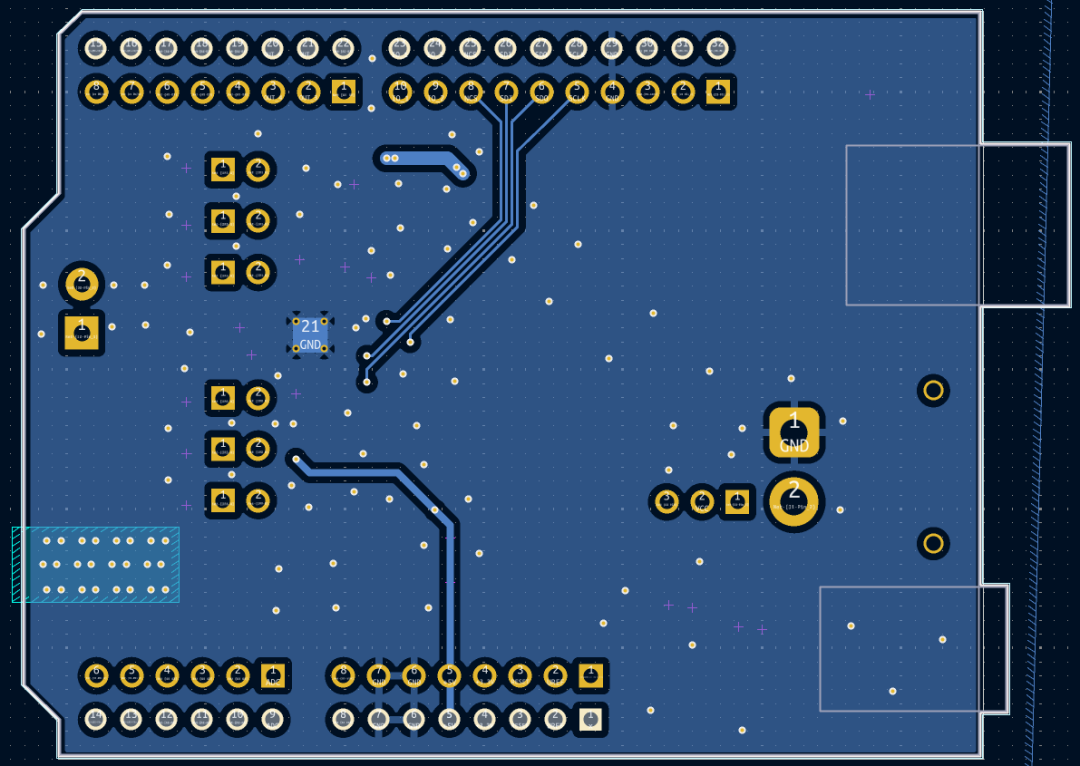
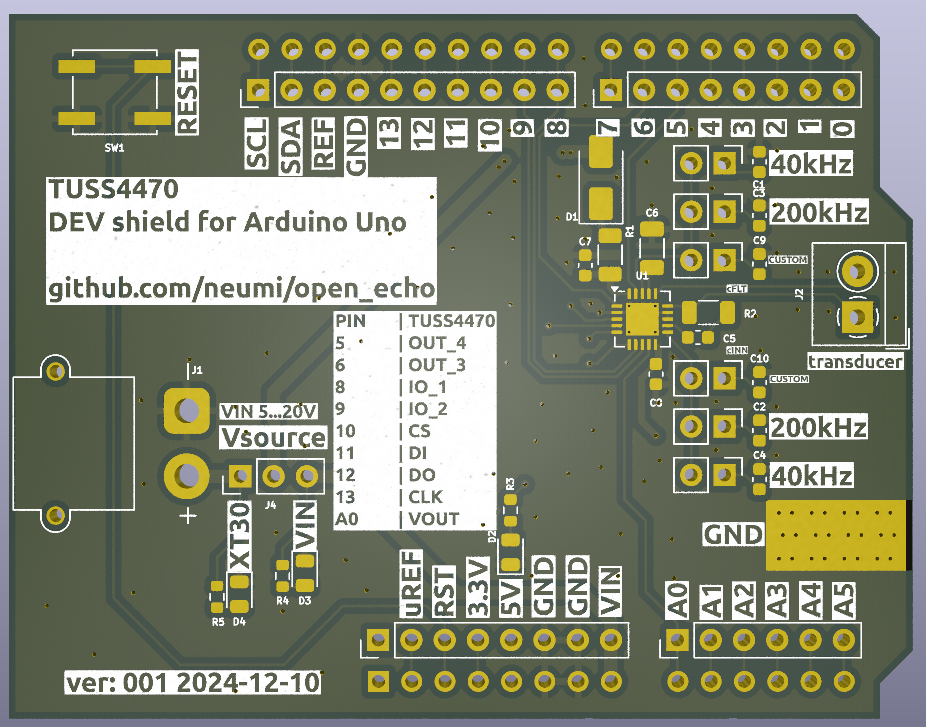
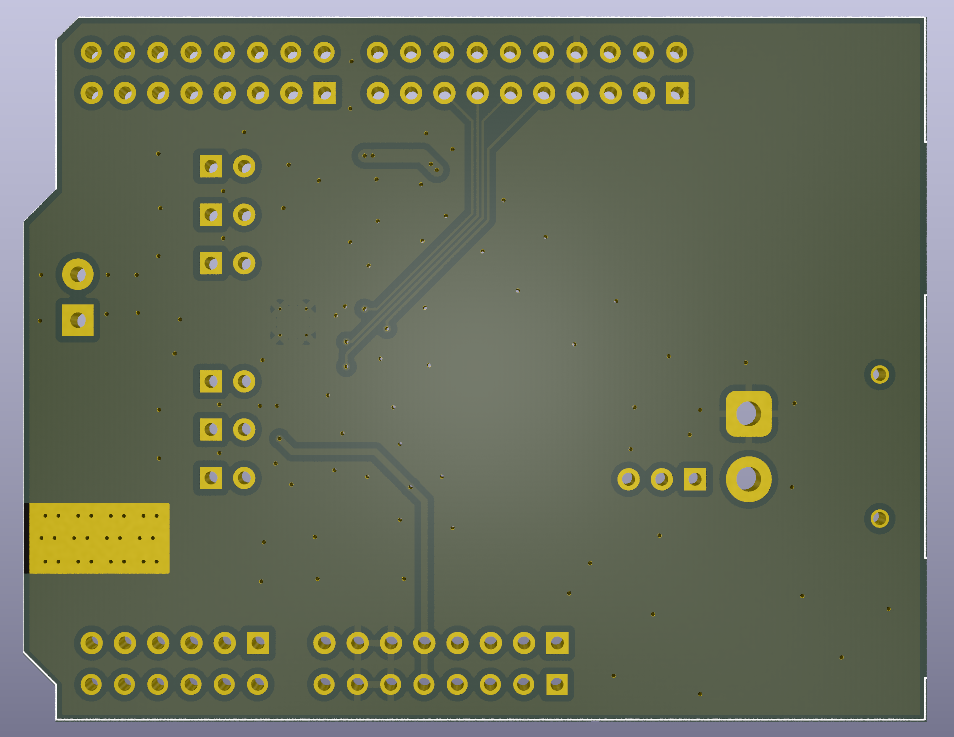
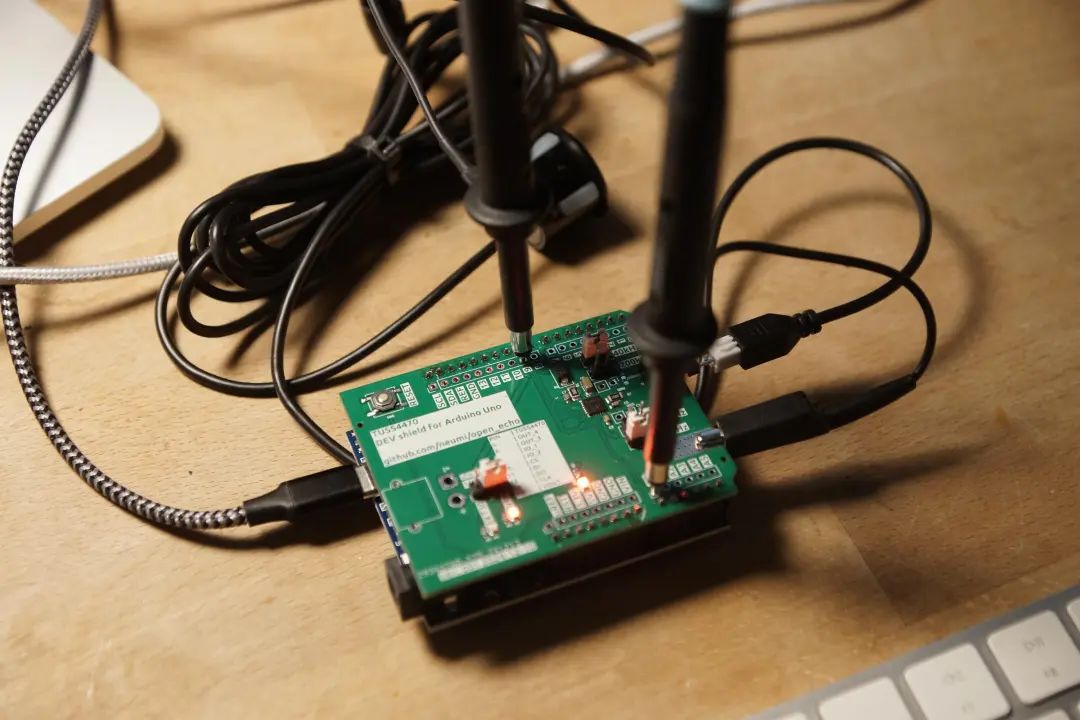
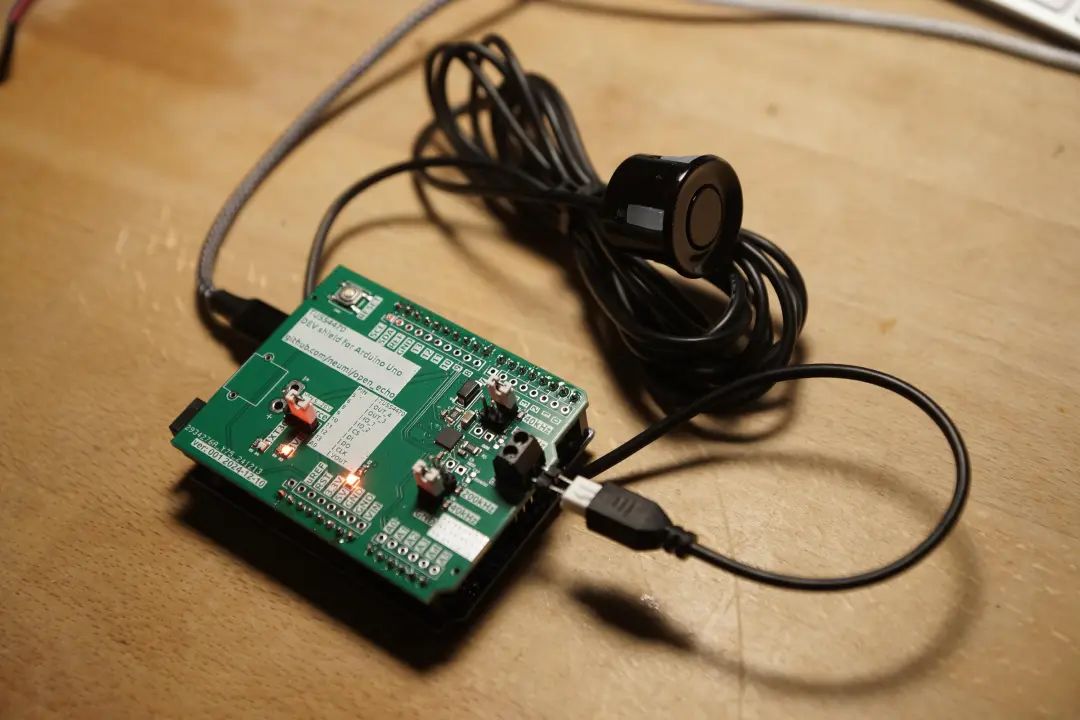
最后... 让我们看一下第二代基于 TUSS4470 的 Shield 原理图、PCB 和 测量过程中的一些实体图片:
|
1248 浏览 0 评论
1323 浏览 0 评论
电磁脉冲:想做个大功率的电磁脉冲,请各位大神告诉我要买哪些设备?
2125 浏览 0 评论
9908 浏览 0 评论
9352 浏览 0 评论
 /6
/6 
关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
电子发烧友 (电路图) 湘公网安备 43011202000918 号 电信与信息服务业务经营许可证:合字B2-20210191 工商网监
湘ICP备2023018690号
工商网监
湘ICP备2023018690号






 1330
1330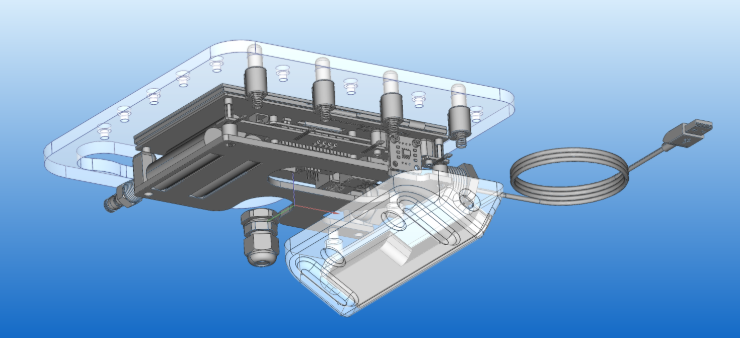




 淘帖
淘帖



