完善资料让更多小伙伴认识你,还能领取20积分哦, 立即完善>
3天内不再提示
前言我们的计划始于2016年,当时有一个简单的问题:我们如何让机器人和编程对每个人都可用? 是学习电子和编程的最佳工具之一,但使用带有有线组件的试验板对初学者来说可能具有挑战性。为了简化体验,我决定使用我的旧Anet A8 3D打印机构建一个紧凑的机器人手臂。
为了消除布线和试验板的麻烦,我设计了一个定制的即插即用板,使构建和控制3D打印机器人手臂变得更容易。编程教育机器人(Pedro)诞生了。
自创建以来,Pedro已经发生了重大变化,通过几次关键更新改进了其功能和功能。 Pedro机器人优化在2022年,着手通过几项关键改进来增强Pedro:
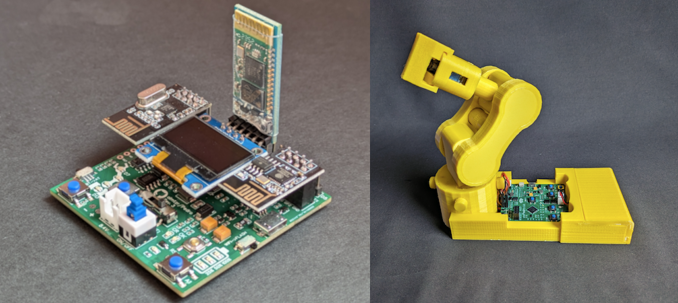
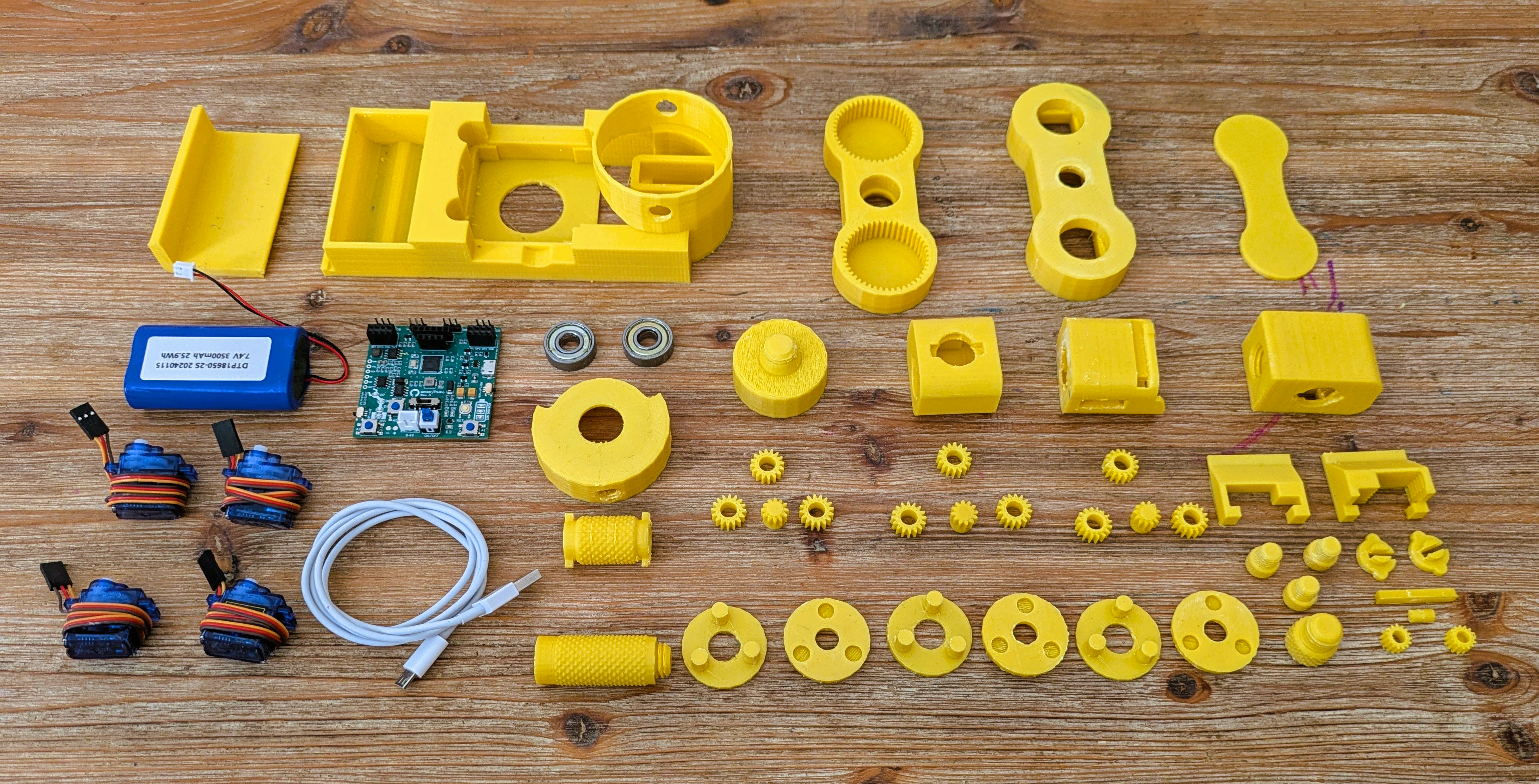
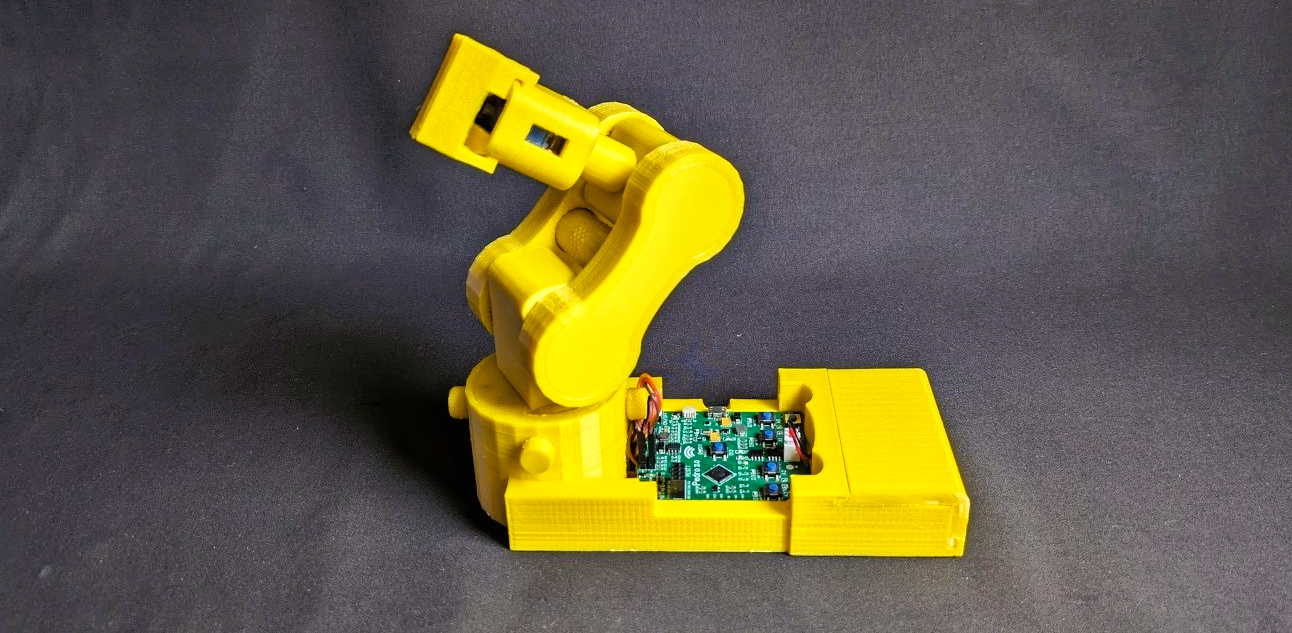
经过多次失败的测试和设计迭代,Pedro 2.0终于在2024年发布,具有改进的功能,经过彻底的测试和验证。 Pedro 2.0是一个完全开源的项目,旨在让每个人都可以访问和定制。它很容易组装,没有螺丝,没有胶水,没有工具需要!非常适合希望探索机器人技术和编程的制造商、学生和教育工作者。 借助Pedro,可以探索、修改和增强设计以满足你的很多需求,使其成为真正的多功能和适应性强的机器人平台。
作为一个开源项目,构建Pedro所需的所有文件都可以在Pedro Github页面上找到:
技术规范
开始组装Pedro不需要额外的装配工具,因此每个人都可以轻松安装。
与Pedro互动的多种方式正如其技术规格中所述,Pedro提供多种控制方式以及三种不同的通信协议,提供灵活多样的控制选项。
手动控制-控制佩德罗使用自己的董事会理想的理解按钮和伺服电机之间的相互作用。
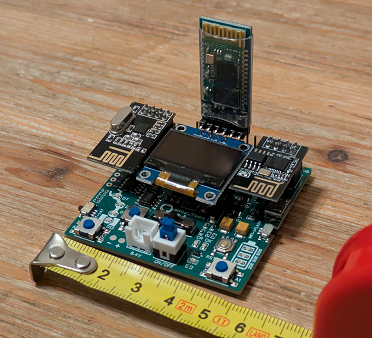
蓝牙(HC-05)-通过蓝牙串行连接使用智能手机或电脑控制Pedro。非常适合无线命令和简单的远程控制应用。
NRF24L01(2.4 GHz无线电)-非常适合使用另一个Pedro板或基于Arduino的遥控器进行多机器人通信或远程控制。这对于群体机器人和低延迟应用程序非常有用。
WiFi(ESP8266-01)-将Pedro连接到网络并通过Web界面进行远程控制。这种模式非常适合物联网应用、远程监控和基于云的控制。 每种模式都是完全开源的,允许自定义固件开发,以使Pedro适应特定项目需求! 收获Pedro为机器人和电子项目提供紧凑而强大的解决方案。
|
1248 浏览 0 评论
1323 浏览 0 评论
电磁脉冲:想做个大功率的电磁脉冲,请各位大神告诉我要买哪些设备?
2125 浏览 0 评论
9908 浏览 0 评论
9352 浏览 0 评论
 /6
/6 
关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
电子发烧友 (电路图) 湘公网安备 43011202000918 号 电信与信息服务业务经营许可证:合字B2-20210191 工商网监
湘ICP备2023018690号
工商网监
湘ICP备2023018690号






 10019
10019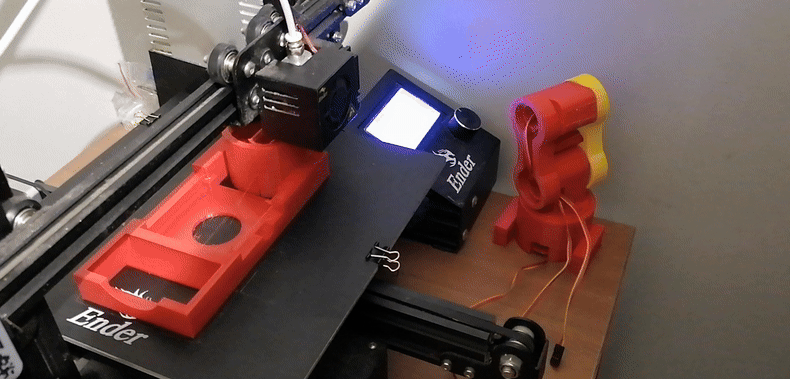

 淘帖
淘帖



