从 PC 到智能手机,下一个更大的计算平台是什么?
最佳答案可能是 机器人 !
如果设想成真,则需要有人为机器人“造脑”,即打造适配的计算平台及操作系统。
就像以计算机为平台的计算机时代,和以手机为平台的移动互联网时代,下一个以机器人为核心的智能机器人时代,是否也会遵循这样的逻辑?
随着ROS 2的诞生,智能机器人开发迎来新篇章 ,它不仅为开发者提供了更为强大、灵活的工具,也为智能机器人的未来开辟了无限可能。
ROS 缘起
2007年,一群怀揣梦想的年轻人,正在斯坦福大学的机器人实验室里进行一场头脑风暴:如果可以开发一款硬件足够强大的机器人,再搭配足够好用的软件系统,那么在此之上开发的应用功能就可以被快速分享了。
例如,我做的自主导航功能你可以用,你做的物体抓取功能我也可以用, 只需开发一个标准化的软硬件平台,在此之上的应用就会逐渐流行 ,这将打造机器人领域的一个全新“爆品”。

将近20年过去了,以“事后诸葛亮”的视角来看,当时那群年轻人花重金打造的服务机器人并没有走进千家万户。
机器人不像计算机或手机,它需要和外界环境产生多种多样的交互,硬件形态非常难以统一 ,小到纳米医疗机器人、家用娱乐机器人,大到智能驾驶汽车、人形机器人,都是未来会并存的机器人形态。
不过,当年遵循“提高机器人软件复用率”思想开发的机器人操作系统——ROS,在2010年开源之后快速发展,助推过去十几年机器人行业的繁荣,逐渐成为智能机器人开发的主流标准。
当然,ROS的快速发展也远超那群年轻人的预期,本来只是为一款家用服务机器人设计的系统,被逐渐用于巡检、运输、农业等众多领域。
需求越来越多,问题也越来越多,为了打造一款能够成为通用机器人标准化软件平台的“操作系统”,ROS 2在2014年第一次被提出,之后推出多个测试版本,并于2017 年年底发布第一个正式版本。
2024年5月ROS 2 Jazzy长期稳定版推出,这也代表着ROS 2走向成熟。《ROS 2智能机器人开发实践》 一书全部代码便基于长期稳定版撰写。
ROS的发展
从2012年开始,使用ROS的人越来越多,ROS社区开始举办每年一届的ROS开发者大会(ROS Conference,ROSCon),来自全球的开发者齐聚一堂,分享自己使用ROS开发的机器人应用, 其中不乏亚马逊、英特尔、微软等大公司的身影 ,参与人数也在逐年增多。
经历前几年野蛮而快速的发展,ROS逐渐稳定迭代,2014年起,ROS跟随Ubuntu操作系统,每两年推出一个长期支持版(Long Time Support,LTS),每个版本支持五年,这标志着ROS的成熟,加快了其普及的步伐。
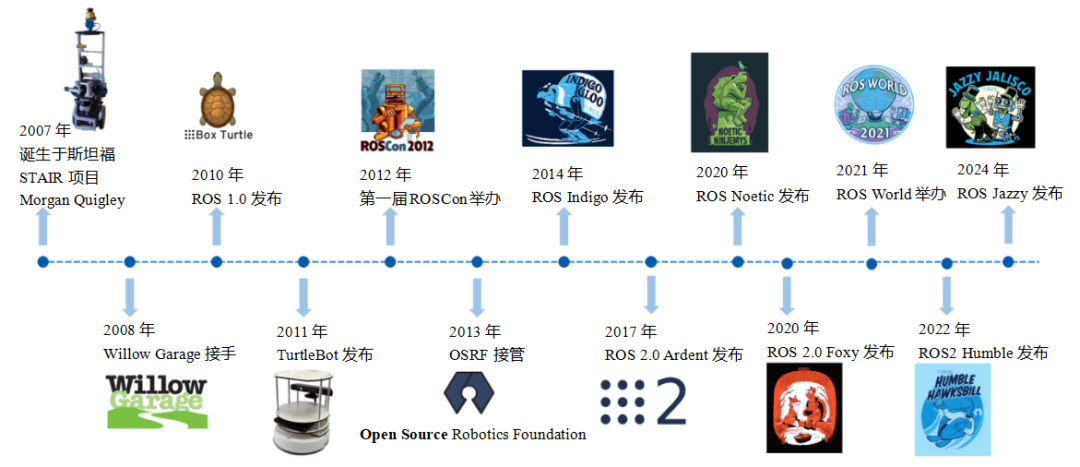
图 ROS的发展历程
回顾2007年,ROS的创始团队原本只想做一款个人服务机器人,却意外成就了一款被广泛应用的机器人软件系统。
但由于设计的局限性,ROS的问题也逐渐暴露,为了能够设计一款适用于所有机器人的操作系统,全新的ROS——ROS 2在2017年年底正式发布。
又历经多年迭代,终于在2022年5月底,ROS 2迎来了其首个长期支持版——ROS 2 Humble,这标志着ROS 2技术体系已趋成熟,同时宣告了ROS 2时代的开启。
2024年5月,ROS 2的第二个长期支持版本 ROS 2 Jazzy发布,这使ROS 2更加稳定、丰满。
如下图所示,从ROS 2发展的时间轴中,大家可以看到ROS 2的生态正在快速迭代发展。
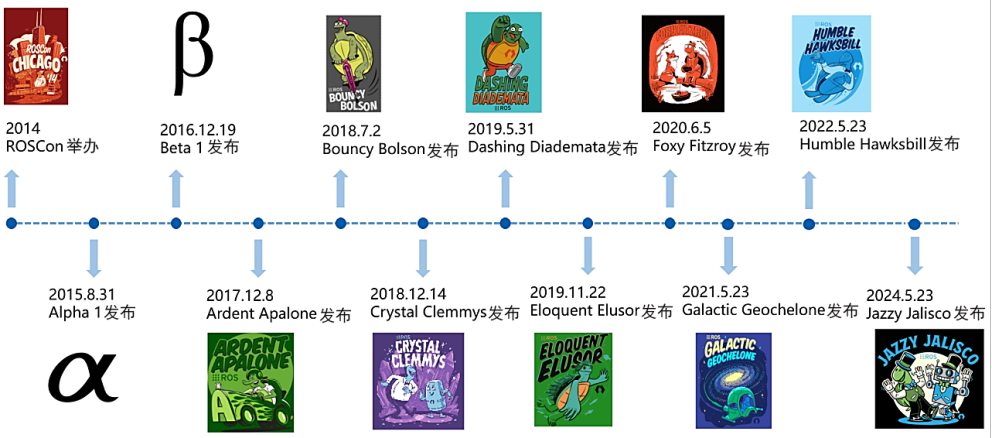
图 ROS 2的发展历程
如何学习 ROS
相信不少学习ROS的小伙伴都看过“古月居”发布的一系列学习资料,在这里,大家能够找到资源较全的 ROS 2 开发集合,能一站式解决开发者从入门到开发的全栈学习需求。
“古月居”社区创始人胡春旭不仅是机器人领域的专家,更是 ROS 在中国的重要推广者之一,在他的影响下,上百万开发者走上 ROS 机器人开发之路,其中不乏现今机器人行业的众多中流砥柱。
如今,为了帮助大家更好地学习ROS,全面系统地了解下一个可能的计算平台,为迎接智能机器人时代打好基础, 胡春旭老师及“古月居”社区负责人李乔龙老师共同撰写了这本500页的机器人入门者案头手册——《ROS 2智能机器人开发实践》一书!
本书汇聚了作者过去十几年的机器人开发经验,基于稳定版ROS 2 Jazzy、全新Gazebo机器人仿真平台,以RDK X3、RDK X5赋能生态产品——OriginBot智能机器人开源套件为原型讲解,手把手教读者从零构建一个完整的机器人系统。

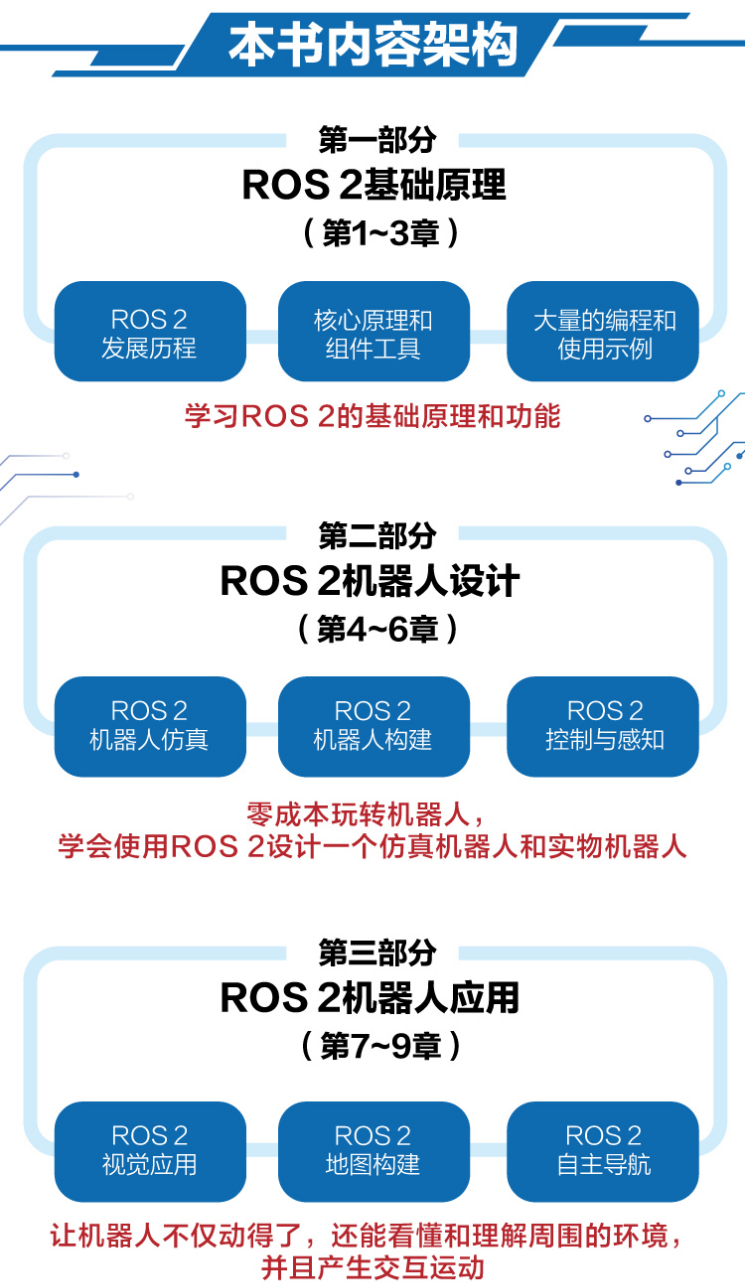
内容架构
本书共有9章,分为三部分。
- 第一部分(第1~3章)介绍ROS 2基础原理**:**主要讲解ROS 2的发展历程、核心原理和组件工具,提供大量的编程和使用示例,为读者全面展示ROS 2的基础原理和功能。
- **第二部分(第4~6章)介绍ROS 2机器人设计:**主要讲解如何使用ROS 2设计一个仿真机器人和实物机器人,有条件的读者甚至可以根据书中内容自己做一个机器人。
- **第三部分(第7~9章)介绍ROS 2机器人应用:**主要讲解使用ROS 2开发机器人视觉识别、地图构建和自主导航等众多应用的方法,让机器人不仅动得了,还能看懂和理解周围的环境,并且产生进一步的交互运动。
本书特色
本书采用 最新稳定版本ROS 2系统和全新一代的Gazebo机器人仿真平台 ,绝大部分功能和源码可以在单独的计算机和Gazebo仿真平台上运行。
同时,本书介绍 实物机器人的搭建方法,并且在实物机器人上实现相应的功能 。
配套源码都加入了中文注释,同时针对核心内容提供C++和Python两个版本,方便读者理解。
所以,本书不仅适合希望了解、学习、应用ROS 2的机器人初学者,也适合有一定经验的机器人开发工程师,同时可以作为资深机器人开发者的参考手册。

申请时间
2025年3月3日——2025年4月3日
活动参与方式
1、在本帖下方留言回帖说说你想要这本书的理由15字以上。
2、我们将从本帖留言中挑选4位幸运者赠送此书籍,共赠送4本。
3、请在收到书籍后2个星期内提交不少于2篇试读报告要求300字以上图文并茂。
4、试读报告发表在电子发烧友开云(中国)官方>>社区活动专版标题名称必须包含 【「# ROS 2智能机器人开发实践」阅读体验】+自拟标题
注意事项
1、活动期间如有作弊、灌水等违反电子发烧友开云(中国)官方规则的行为一经发现将立即取消获奖资格
2、活动结束后获奖名单将在开云(中国)官方公示请活动参与者尽量完善个人信息如管理员无法联系到选中的评测者则视为自动放弃。
3、申请人收货后14天内未完成书评无权将书籍出售或转赠给他人。如无法在收货后14天内提交书评请将书籍退回电子发烧友开云(中国)官方运费自理。
4、如有问题请咨询工作人员(微信:elecfans123)。

 /6
/6 



 工商网监
湘ICP备2023018690号
工商网监
湘ICP备2023018690号






 淘帖
淘帖 3283
3283




